
ゲームプログラミングもいいけれど、目の前でリアルに動くロボットを操るのは迫力が全然違う。
みんなが作ったIchigoJamでロボットを動かしたい!
早速、1台作ってみました。

タミヤのカムプログラムロボット。
最近発売されたガンメタル&オレンジ色バージョンを選択。
プラモデルなんて何年ぶりでしょう。
わくわく・・・。
接着剤は一切不要。
代わりにプラスドライバー(大・小)が必要でした。
ネジの締め具合に気を使います。プラスチックが割れちゃいそう。
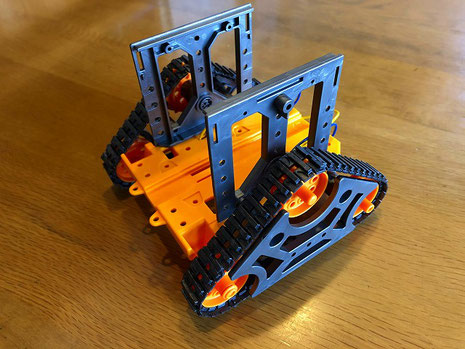
キャタピラを動かすためのギアボックスとモーターを組みました。
ギアボックスは何種類もの小さな歯車の組み合わせです。
ピンセットがあると楽です。

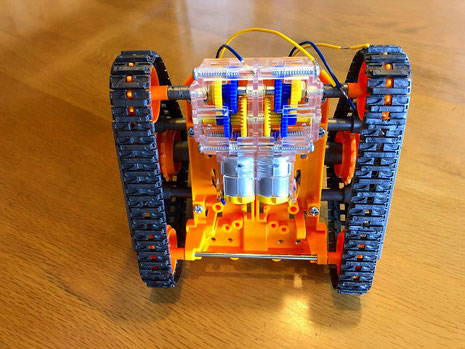
プログラムでロボットを動かすために、IchigoJamを載せます。
今回はIchigoJamの代わりにDakeJacket(写真左)を使いました。(理由は後で)
写真右のはMapleSyrup。モータを制御するために組み合わせて使います。
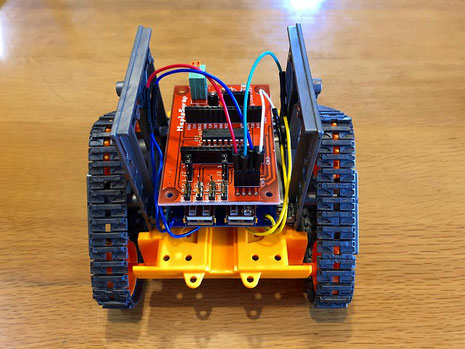
DakeJacketとMapleSyrupを重ねてロボットに載せました。
配線を間違わないようにするのと、線の取り回しに気を使いました。
ピンセットがあるとやりやすいです。
ロボットの腕は、キャタピラが回れば勝手に上下します。
しかし!
今回はロボットの腕もプログラムで制御しよう!と欲張りました。
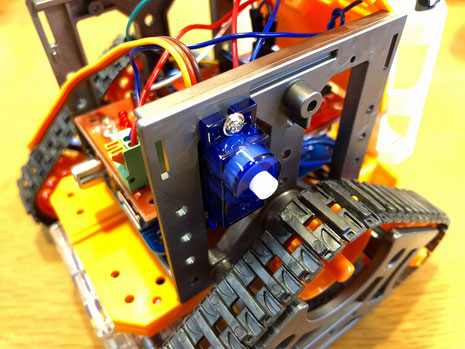
取り付けたのは写真中央の青い部品「サーボモータ」。
これで腕を動かします。

サーボモータに腕を装着。
これで、腕とキャタピラをプログラムで制御できるようになりました。
前後左右に動きながら腕を振るロボットの完成です。
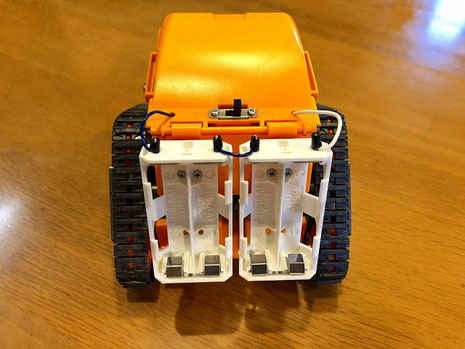
電池ボックスを背中に乗せました。
背中の乾電池がコンピュータとモータに電源を供給します。
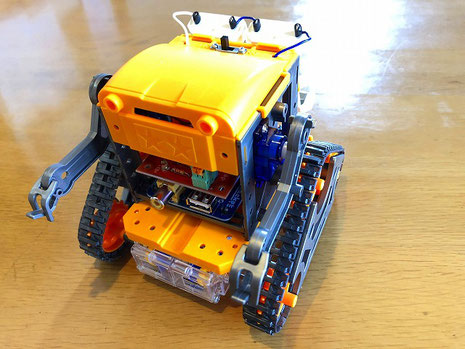
頭と顔を取り付けて完成!
あとは、プログラミングすれば思い通りに動くはず。
(つづく)
コメントをお書きください